
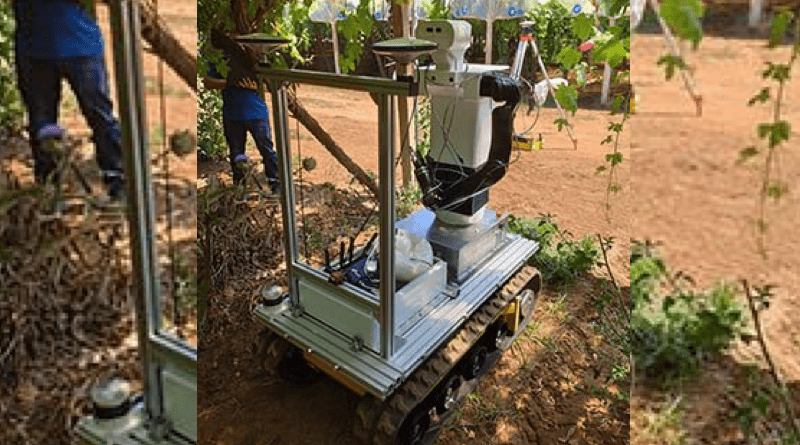
Collaborative Robots To Harvest Table Grapes
Researchers from the UPC’s Institute of Robotics and Industrial Informatics (IRI) and the Agricultural Machinery Unit (UMA) are working with other research centres and European companies to develop collaborative robots to harvest and prune table grape vines.
In the context of Industry 4.0, human-robot collaboration is increasingly common in industry, but not in agriculture, where the development of innovative robotics and AI-based technologies is still at a very early stage, despite being considered the cornerstone for the future of sustainable agriculture. The Universitat Politècnica de Catalunya · BarcelonaTech (UPC) is now working with other European partners in the European project CANOPIES to explore a new paradigm for human-robot collaboration in precision agriculture for permanent crops, and specifically for harvesting and pruning table grape vines.
Under this four-year European project, with H2020 funding of 6.9 million euros, and coordinated by the Università degli Studi Roma Tre (Italy), research centres and leading robotics companies in Europe will demonstrate how a team of robots work in a coordinated and collaborative manner with each other and with people to harvest, prune and transport grapes—an initiative that paves the way for new approaches to manage crops and agricultural holdings.
At the UPC, the project is led by Alberto Sanfeliu, a researcher at the Institute of Robotics and Industrial Informatics (IRI)—a joint centre of the UPC and the Spanish National Research Council (CSIC)—in collaboration with the Agricultural Machinery Unit (UMA)—affiliated with the Barcelona School of Agri-Food and Biosystems Engineering (EEABB)—led by researcher Emilio Gil.
Perfecting human-machine relationships
Robots developed in this project will be able not only to operate autonomously, but also to collaborate with each other and with people. This is the key point, as explained by researcher Alberto Sanfeliu, who leads the project at the IRI: “Almost no work has been done so far on how people and robots interact in agricultural processes. This game-changing project will have robots help in harvesting and pruning tasks in an automated way, also by collaborating with each other and with humans. This type of collaboration is becoming popular in factories, but it is pretty uncommon in agriculture.”
The IRI’s mission within the project is to “develop the science and technology that will allow human-robot interaction, to have them help each other in harvesting grapes,” explains Sanfeliu, who is also a researcher at the Artificial Vision and Intelligent Systems (VIS) research group and a professor at the Barcelona School of Industrial Engineering (ETSEIB).
The IRI also develops the robots’ perception systems based on computer vision technologies, to make them capable of identifying grapes at optimum ripeness, locating the appropriate cutting point on the peduncle and determining which and how branches should be pruned, which are high-precision tasks.
Specialised in precision and mechanised agriculture, the UMA’s role in the project is essentially to implement the operations and processes involved in agriculture so that robots integrate all agricultural machinery functions, duly adapted to grape harvesting, pruning and transporting.
Revolutionizing an ancient agricultural tradition
The challenge of using robotics for harvesting and pruning requires developing complex processes of perception, communication, shared task planning, human intention prediction, interaction and action. CANOPIES aims to fill the existing development gap of fully autonomous robotic solutions for permanent crops, with great impact on industry and society.
“CANOPIES is a great opportunity not only to achieve a more sustainable agricultural paradigm, but also to make agriculture attractive to young people,” explains Andrea Gasparri, a researcher at the Università degli Studi Roma Tre, the project coordinator. “This can be attained through effective human-robot collaboration, which requires cutting-edge robotics, AI and virtual reality solutions.”
Such solutions aim to revolutionise an age-old agricultural tradition by achieving more efficient high-quality table grape harvesting and at the same time increasing productivity.