
Lab Makes 4D Printing More Practical
Soft robots and biomedical implants that reconfigure themselves upon demand are closer to reality with a new way to print shapeshifting materials.
Rafael Verduzco and graduate student Morgan Barnes of Rice’s Brown School of Engineering developed a method to print objects that can be manipulated to take on alternate forms when exposed to changes in temperature, electric current or stress.
The researchers think of this as reactive 4D printing. Their work appears in the American Chemical Society journal ACS Applied Materials and Interfaces.
They first reported their ability to make morphing structures in a mold in 2018. But using the same chemistry for 3D printing limited structures to shapes that sat in the same plane. That meant no bumps or other complex curvatures could be programmed as the alternate shape.
Overcoming that limitation to decouple the printing process from shaping is a significant step toward more useful materials, Verduzco said.
“These materials, once fabricated, will change shape autonomously,” Verduzco said. “We needed a method to control and define this shape change. Our simple idea was to use multiple reactions in sequence to print the material and then dictate how it would change shape. Rather than trying to do this all in one step, our approach gives more flexibility in controlling the initial and final shapes and also allows us to print complex structures.”
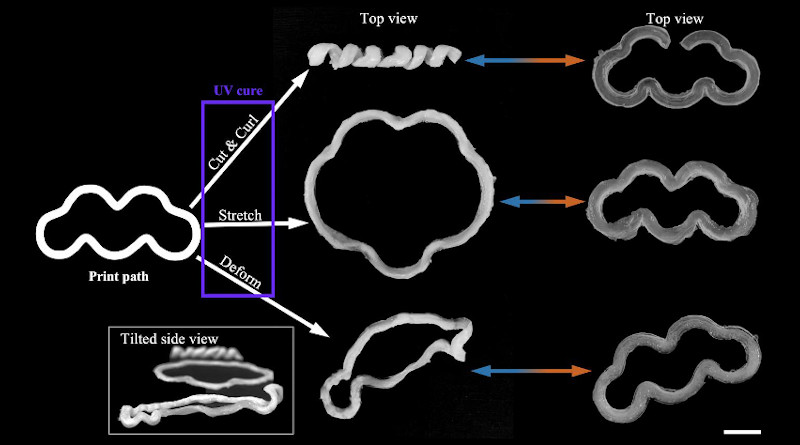
The lab’s challenge was to create a liquid crystal polymer “ink” that incorporates mutually exclusive sets of chemical links between molecules. One establishes the original printed shape, and the other can be set by physically manipulating the printed-and-dried material. Curing the alternate form under ultraviolet light locks in those links.
Once the two programmed forms are set, the material can then morph back and forth when, for instance, it’s heated or cooled.
The researchers had to find a polymer mix that could be printed in a catalyst bath and still hold its original programmed shape.
“There were a lot of parameters we had to optimize — from the solvents and catalyst used, to degree of swelling, and ink formula — to allow the ink to solidify rapidly enough to print while not inhibiting the desired final shape actuation,” Barnes said.
One remaining limitation of the process is the ability to print unsupported structures, like columns. To do so would require a solution that gels just enough to support itself during printing, she said. Gaining that ability will allow researchers to print far more complex combinations of shapes.
“Future work will further optimize the printing formula and use scaffold-assisted printing techniques to create actuators that transition between two different complex shapes,” Barnes said. “This opens the door to printing soft robotics that could swim like a jellyfish, jump like a cricket or transport liquids like the heart.”