
Goldfinger, Technology Worn On A Hand
An innovative glove in the field of human-machine interfacing – powered by movement and integrating technological components into hi-tech fabrics – developed thanks to the collaboration between the Politecnico di Torino and MIT Boston
To control machines remotely by the simple movement of a hand. It will be possible in a natural and economical way thanks to Goldfinger, an innovative prototype of human-machine interface designed and built in collaboration between the Politecnico di Torino and the Massachusetts Institute of Technology in Boston under the direction of Dr. Giorgio De Pasquale from the Department of Mechanical and Aerospace Engineering of the Italian University.
The system was born to meet the needs, common to many sectors, to simplify the user-machine communication of data and commands. In this case, the interface has a glove-shape, fully wearable and comfortable, which integrates all the electronic and mechanical components necessary for operation.
The sectors where this application could address are manifold, but primarily the industrial field (for the management of factory plants and machines, for example in the case in which safety standards require special management of work spaces), the medical field (for example, providing the surgeon with an ergonomic controller which does not alter the normal movements of the hand), and finally in the fields related to virtual reality (for the simulation of work environments, for staff training, etc.).
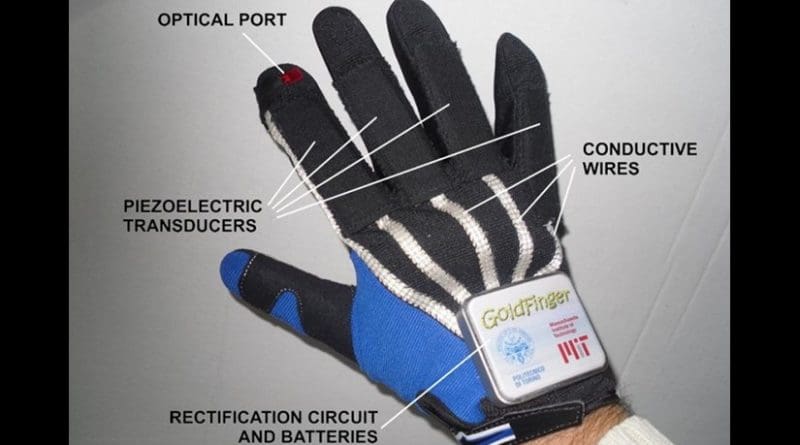
The main point of innovation compared to other devices is that Goldfinger has the ability to self-power. It generates electrical energy by the movement of the fingers, which provides a much greater autonomy of operation; furthermore, it is a model without electrical wires needed for a power supply. The wireless transmission method and the integration of many hi-tech components supported within the glove fabric (so the user does not perceive their presence) constitute additional highly innovative elements of this prototype. Among these components, for example, there are conductive wires inserted into the fabric texture, piezoelectric transducers with high flexibility and electrical switches made within the fabric itself rather than with the traditional electronic components.
The final result is a human-machine interface of a new conception, based on the conversion of biomechanical energy of the body, with which the user can send their commands to various types of machines and systems with the simple movement of a hand. The optical tracking software, together with the interface software developed alongside the prototype, allow for the interpretation of the user’s movements and converting them into commands and instructions to operate the facilities for which control is required.
Goldfinger was presented to the international scientific community in the main world conference of micro-power generation that took place in Boston from 1 to 4 December, as well as being the subject of the article in a journal published by ASME (American Society of Mechanical Engineering) and IEEE (Institute of Electrical and Electronic Engineers).