
Third And Fourth Robotic Arms Feel Like A Part Of User’s Own Body
A research team with members from the University of Tokyo, Keio University and Toyohashi University of Technology have developed supernumerary robotic arms operated by the user’s foot movements in a virtual environment. It has shown that users can feel the supernumerary robotic arms as a part of their own body (embodiment). The study contributes to the design of human augmentation system that can be used naturally and freely without cognitive effort, like the user’s own body.
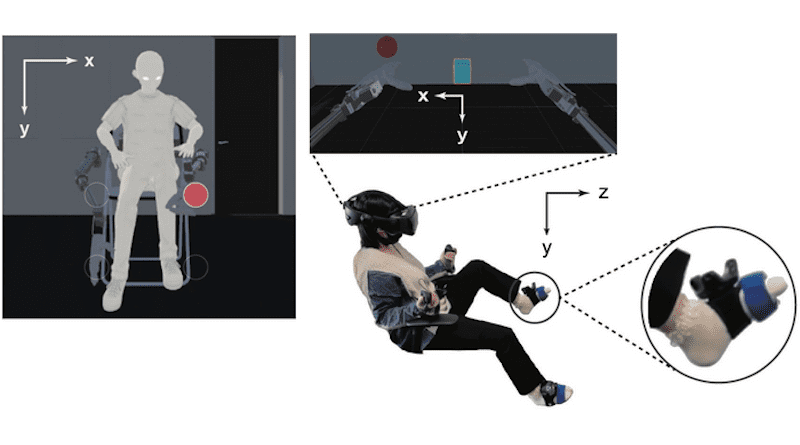
Doctoral student Ken Arai and Professor Masahiko Inami from the University of Tokyo, in collaboration with researchers from Keio University and Toyohashi University of Technology, have developed supernumerary robotic arms that works in conjunction with user’s foot movements in a virtual reality (VR) environment, and have shown that users consider the supernumerary robotic arms as a part of their own body (embodiment). In order to extend bodily functions using robotic third and fourth arms, it is important that the arms can be embodied and easily manipulated like the user’s own body parts. The research group performed experiments to capture the perceptual changes that could occur when the arms were embodied after using and learning about the supernumerary robotic arms. The bodily phenomenon of visual-haptic interaction with the supernumerary robotic arms and the sensation that the number of one’s arm has increased (supernumerary-limb sensation) have been revealed for the first time in the world. This research has been published in Scientific Reports.
Humans do many things in our daily lives by skillfully manipulating the own bodies. Then, they use tools to do things that are difficult to do with their bodies alone. For example, humans can use scissors to neatly cut paper into desired shapes and use a rake to pick up distant objects. Can humans add an extra limb to their own bodies, such as a third arm or sixth finger? The goal of supernumerary robotic arms is to extend the body’s functions by adding extra limbs using appropriate human-computer interaction systems. It is expected that the supernumerary robotic arms will move as intended naturally, just like the user’s own arms and legs. However, whether the robotic system can be perceived as part of the user’s own body has not been sufficiently investigated.
It has been shown that humans can embody artificial objects other than their own body or can feel the sense of body ownership and agency with the objects. Therefore, the researchers aimed to clarify whether the third and fourth robotic arms could become embodied after using them.
The researchers investigated whether the use of the supernumerary robotic arms in VR enables the user to perceive the arms as part of his or her own body and whether perceptual changes occur in the proximal space around the robotic arms. The results of the experiment showed that after learning to use the supernumerary robotic system, subjective evaluation scores indicated the supernumerary robotic arms were embodied, and the perceptual change in visual-haptic integration around the supernumerary arm (peripersonal space) correlated with the subjective evaluation score that felt the number of arms increased (supernumerary-limb sensation).
Future Outlook
These results suggest that the augmentation of the body’s functions by adding extra body parts has generated the sensation that the user has acquired new body parts that are different from his or her innate body parts. These findings also contribute to the creation of a method for the evaluation of supernumerary robotic systems from the perspective of embodiment. Moreover, the embodiment of supernumerary robotic limbs may expand and refine embodiment research in cognitive sciences.